

摘要:本文探讨了马斯克提出的纯视觉方案与激光雷达方案,重点分析了这两种方案的算力要求、技术门槛以及未来融合的可能性。纯视觉方案依赖高性能算法和大数据处理能力,而激光雷达方案则提供更精确的感知能力。文章指出,随着技术的不断进步,这两种方案的融合将成为未来自动驾驶领域的重要发展方向。
马斯克的纯视觉方案
马斯克的纯视觉方案以深度学习为核心,通过大量的图像数据训练模型,实现对环境的感知和理解,此方案依赖于高性能的计算机视觉算法和强大的算力支持,因此硬件要求极高,随着神经网络规模的扩大和计算能力的提升,纯视觉方案的性能逐渐得到优化,但这也意味着其门槛相对较高。
优点:感知能力强大,能识别各种复杂的场景和物体。
缺点:对算力要求极高,需要高性能的芯片和大量的计算资源。
激光雷达方案
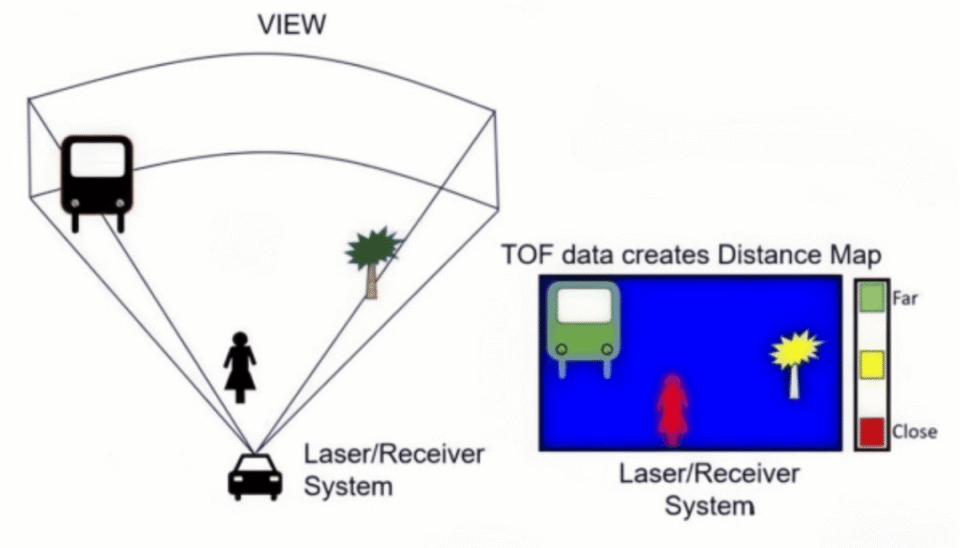
激光雷达方案是一种相对成熟的自动驾驶技术,它通过激光雷达获取环境信息,结合地图数据和其他传感器信息,实现高精度的定位和导航,相比纯视觉方案,激光雷达方案的门槛相对较低,成本也相对较低,因此在市场上具有一定的竞争优势。
优点:技术相对成熟,成本较低。
缺点:精度和稳定性需进一步提高,数据处理和分析需专业技术和人才支持。
纯视觉方案与激光雷达方案的比较
纯视觉方案和激光雷达方案各有优缺点,纯视觉方案感知能力强,但算力要求高、门槛高;而激光雷达方案虽然成本稍高,但技术相对成熟、门槛较低,在实际应用中,两种方案可以相互补充,提高自动驾驶系统的性能和稳定性。
未来的融合趋势
对于未来的发展趋势,许多专家和学者都认为纯视觉方案和激光雷达方案最终可能会实现融合,这种融合将充分发挥两种方案的优点,提高自动驾驶系统的性能和稳定性,纯视觉方案可以通过深度学习算法提高激光雷达数据的解析能力,而激光雷达方案可以为纯视觉方案提供稳定的环境信息。
马斯克的纯视觉方案和激光雷达方案在自动驾驶领域都具有广泛的应用前景,随着技术的不断进步和成本的降低,这两种方案可能会实现融合,为自动驾驶技术的发展开辟新的道路,我们期待看到更多的创新和突破,推动自动驾驶技术的快速发展。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号